이 기술은 좁은 틈에서도 유연하게 움직이며 물체를 조작할 수 있어 수술용 로봇, 산업 점검 장비 등 다양한 분야에 활용이 기대된다.
연구 결과는 국제학술지 네이처 커뮤니케이션즈에 게재됐다.
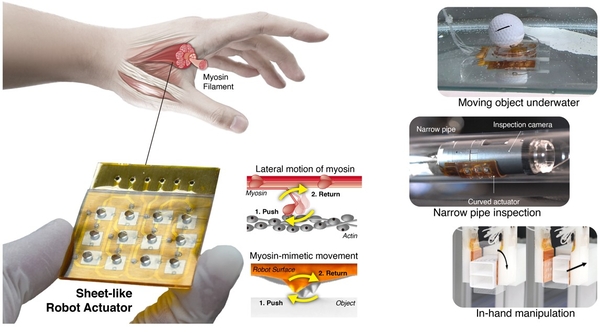
기존 로봇은 단단한 금속 기반으로 섬세한 조작과 좁은 공간 진입에 한계가 있었지만, 연구팀은 근육 단백질 '마이오신'의 원리를 모방해 수십 개 공기주머니와 다채널 공기 통로로 구성된 얇은 액추에이터를 구현했다.
공기를 순차적으로 주입하면 표면 돌기들이 다양한 방향으로 움직이며 애벌레처럼 기어가거나 정밀하게 물체를 조작할 수 있다.
실험 결과, 해당 로봇은 사람 손가락처럼 섬세하게 움직이고, 물속 작동은 물론 배관 청소 등 기존 로봇이 어려웠던 작업도 수행 가능했다.
또한 수학적 모델을 통해 다양한 설계와 제어도 가능하도록 했다.
김기훈 교수는 “얇고 부드러운 구조 안에 3차원 공기 네트워크를 구현하고, 생체 모사로 다방향 움직임을 가능케 한 점이 이번 기술의 핵심”이라며 “의료, 산업, 탐사 등 다양한 분야에서 활용되기를 기대한다”고 밝혔다.
이번 연구는 과기정통부와 산업통상부의 연구지원사업(선도연구센터·알키미스트프로젝트)의 지원을 받아 진행됐다.
이부용 기자
queennn@paran.com